Publications
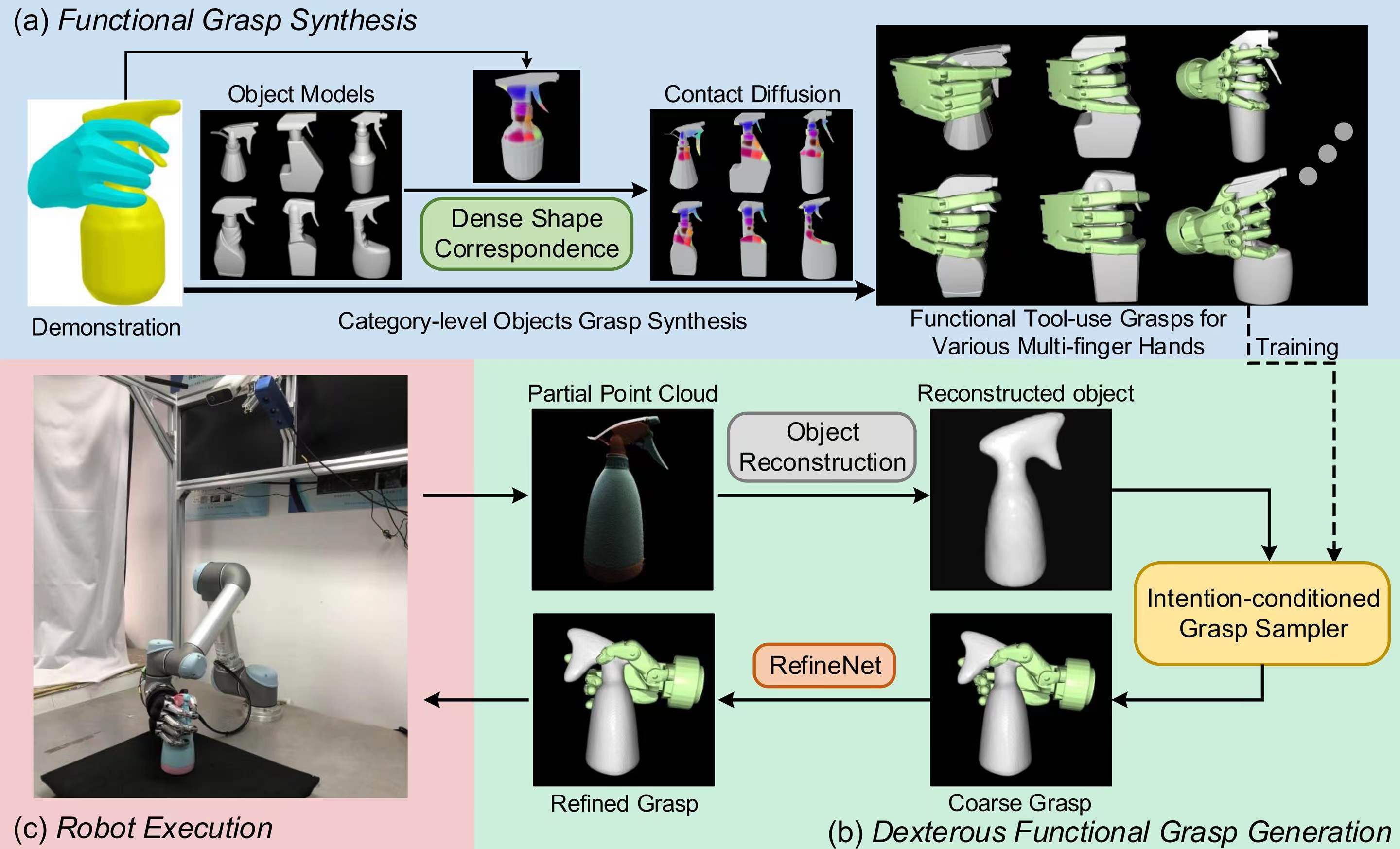
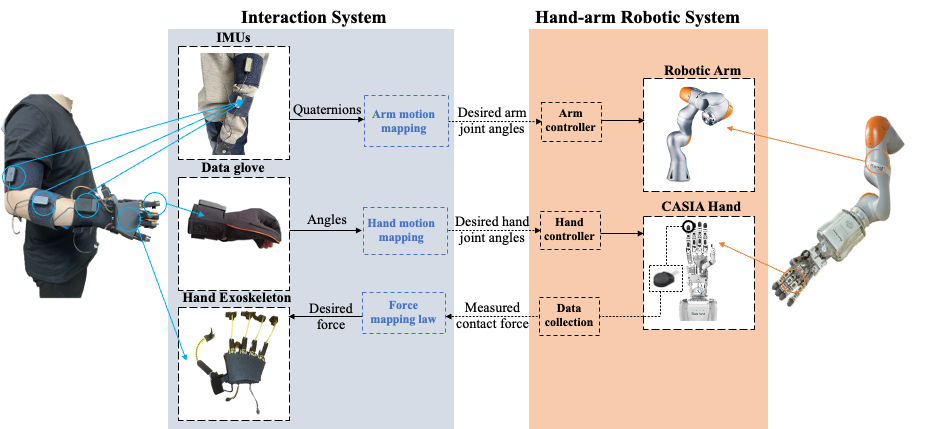
Wei Wei, Peng Wang*, et. al., Generalized Anthropomorphic Functional Grasping with Minimal Demonstrations, arXiv preprint arXiv:2303.17808.
Dexterous Hands and Humanoid Dexterous Manipulative Robots
Wei Wei, Peng Wang*, et. al., Generalized Anthropomorphic Functional Grasping with Minimal Demonstrations, arXiv preprint arXiv:2303.17808.
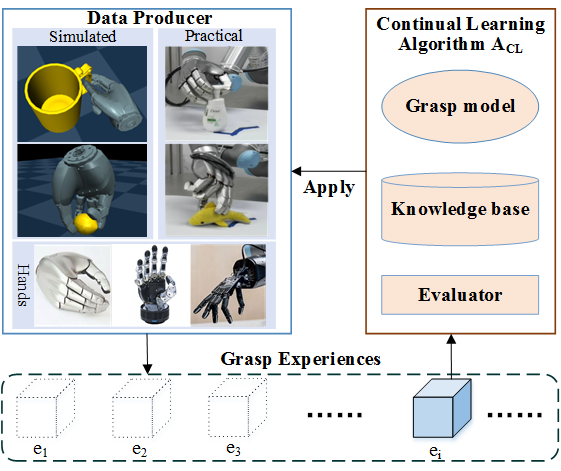
Wanyi Li, Wei Wei, Peng Wang*, Continual Learning for Anthropomorphic Hand Grasping, IEEE Transactions on Cognitive and Developmental Systems, 2023.
@article{li2023continual, title={Continual Learning for Anthropomorphic Hand Grasping}, author={Li, Wanyi and Wei, Wei and Wang, Peng}, journal={IEEE Transactions on Cognitive and Developmental Systems}, year={2023}, publisher={IEEE} }
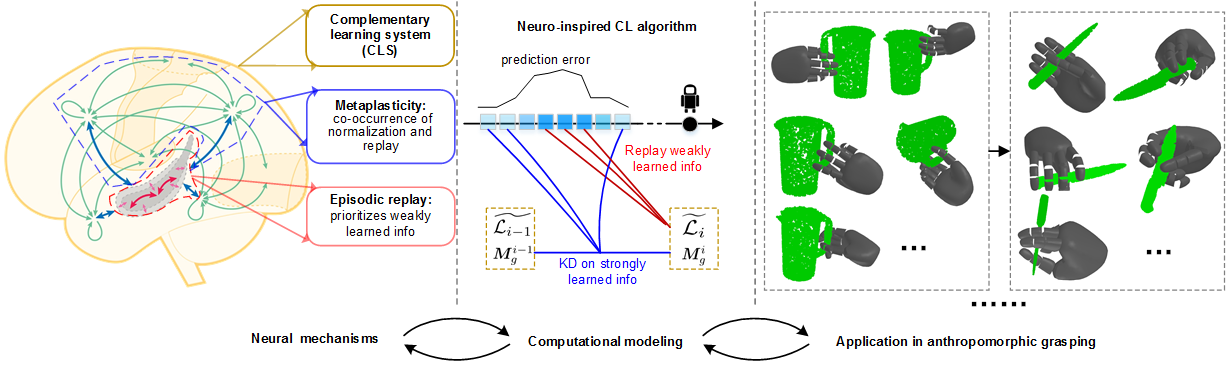
Wanyi Li, Wei Wei, Peng Wang*, Neuro-inspired Continual Anthropomorphic Grasping, iScience, Cell Press, 2023.
@article{li2023neuro, title={Neuro-inspired continual anthropomorphic grasping}, author={Li, Wanyi and Wei, Wei and Wang, Peng}, journal={Iscience}, volume={26}, number={6}, year={2023}, publisher={Elsevier} }
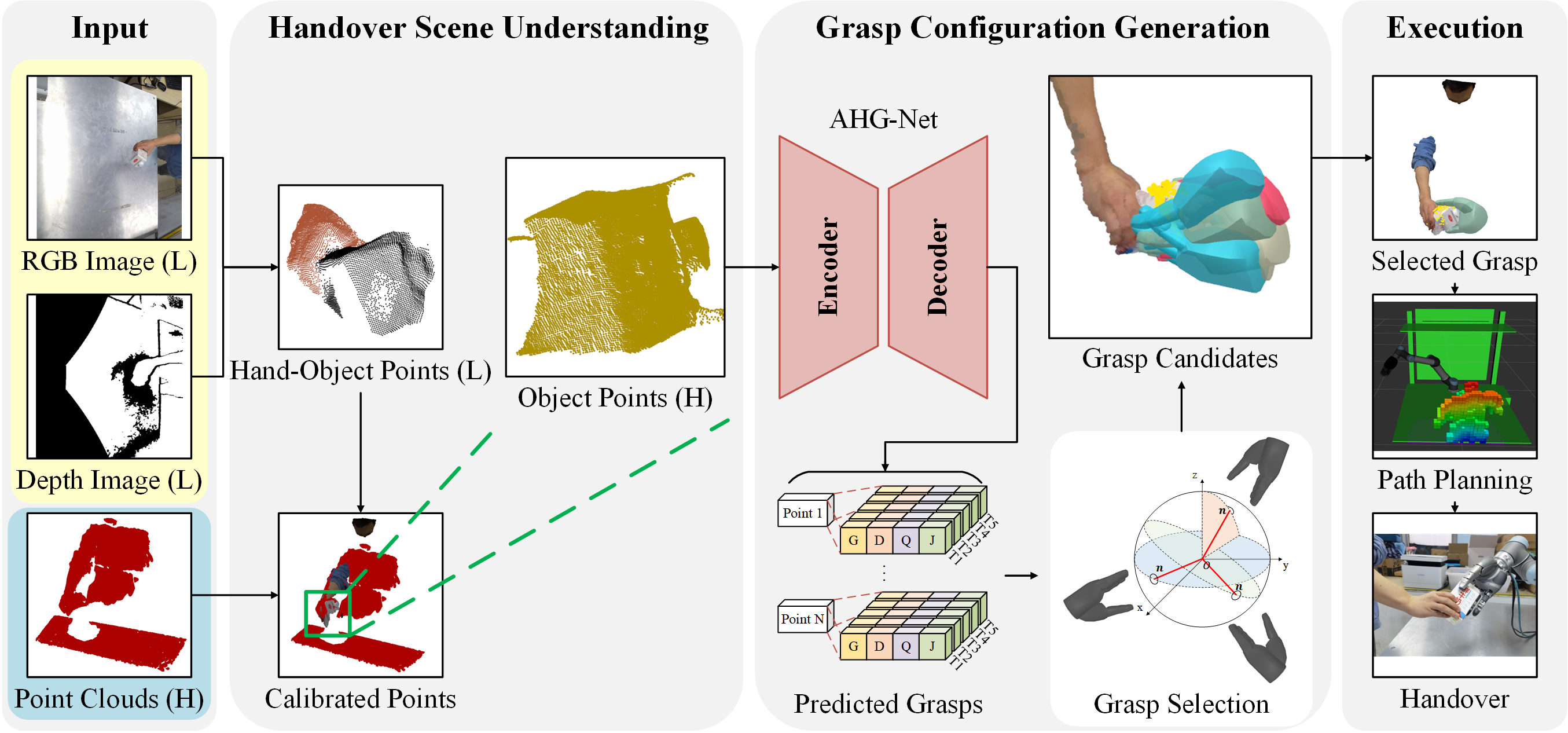
Haonan Duan, Peng Wang*, Yiming Li, Daheng Li, Wei Wei, Learning Human-to-Robot Dexterous Handovers for Anthropomorphic Hand, IEEE Transactions on Cognitive and Developmental Systems, 2022.
@article{duan2022learning, title={Learning human-to-robot dexterous handovers for anthropomorphic hand}, author={Duan, Haonan and Wang, Peng and Li, Yiming and Li, Daheng and Wei, Wei}, journal={IEEE Transactions on Cognitive and Developmental Systems}, year={2022}, publisher={IEEE} }
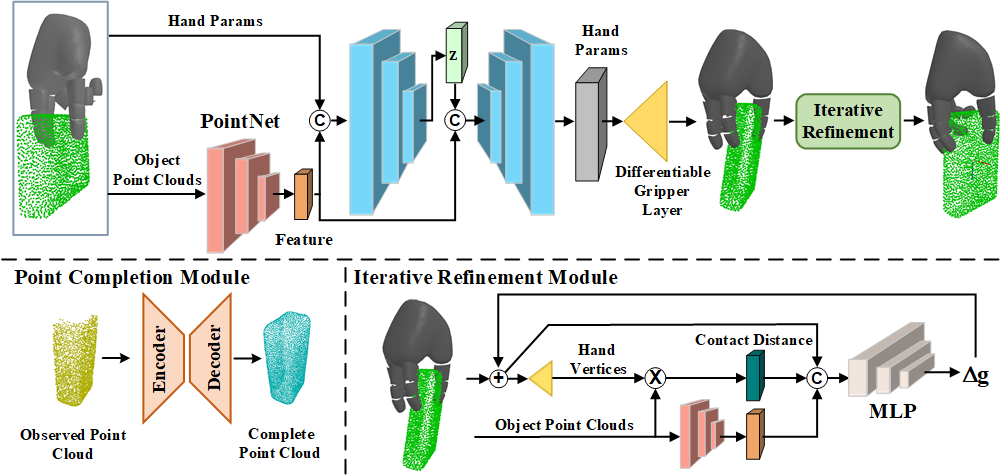
Wei Wei, Daheng Li, Peng Wang*, et. al., DVGG: Deep Variational Grasp Generation for Dextrous Manipulation, IEEE Robotics and Automation Letter, 2022.
@article{wei2022dvgg, title={DVGG: Deep variational grasp generation for dextrous manipulation}, author={Wei, Wei and Li, Daheng and Wang, Peng and Li, Yiming and Li, Wanyi and Luo, Yongkang and Zhong, Jun}, journal={IEEE Robotics and Automation Letters}, volume={7}, number={2}, pages={1659--1666}, year={2022}, publisher={IEEE} }
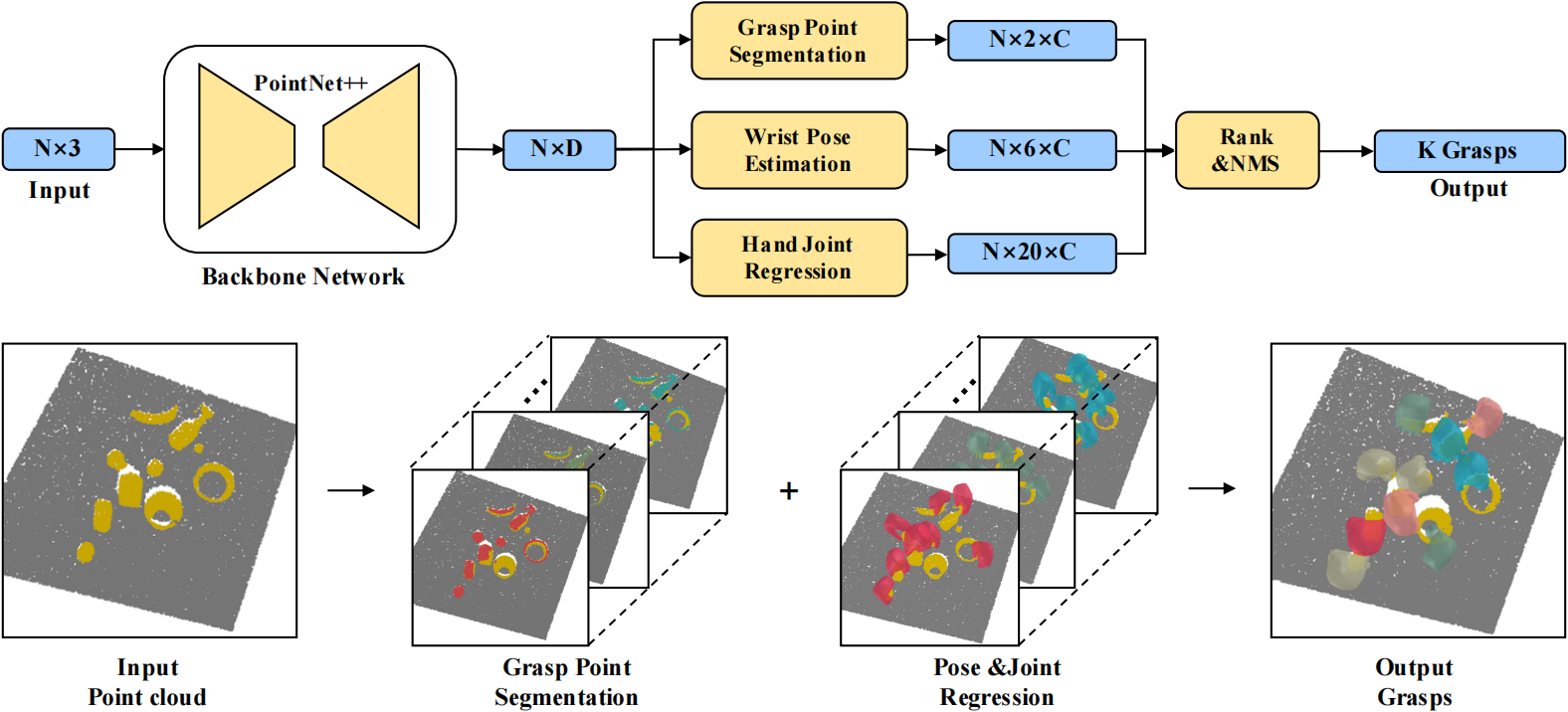
Yiming Li, Wei Wei, Daheng Li, Peng Wang*, et. al., HGC-Net: Deep Anthropomorphic Hand Grasping in Clutter. IEEE International Conference on Robotics and Automation (ICRA), 2022.
@inproceedings{li2022hgc, title={HGC-Net: Deep anthropomorphic hand grasping in clutter}, author={Li, Yiming and Wei, Wei and Li, Daheng and Wang, Peng and Li, Wanyi and Zhong, Jun}, booktitle={2022 International Conference on Robotics and Automation (ICRA)}, pages={714--720}, year={2022}, organization={IEEE} }
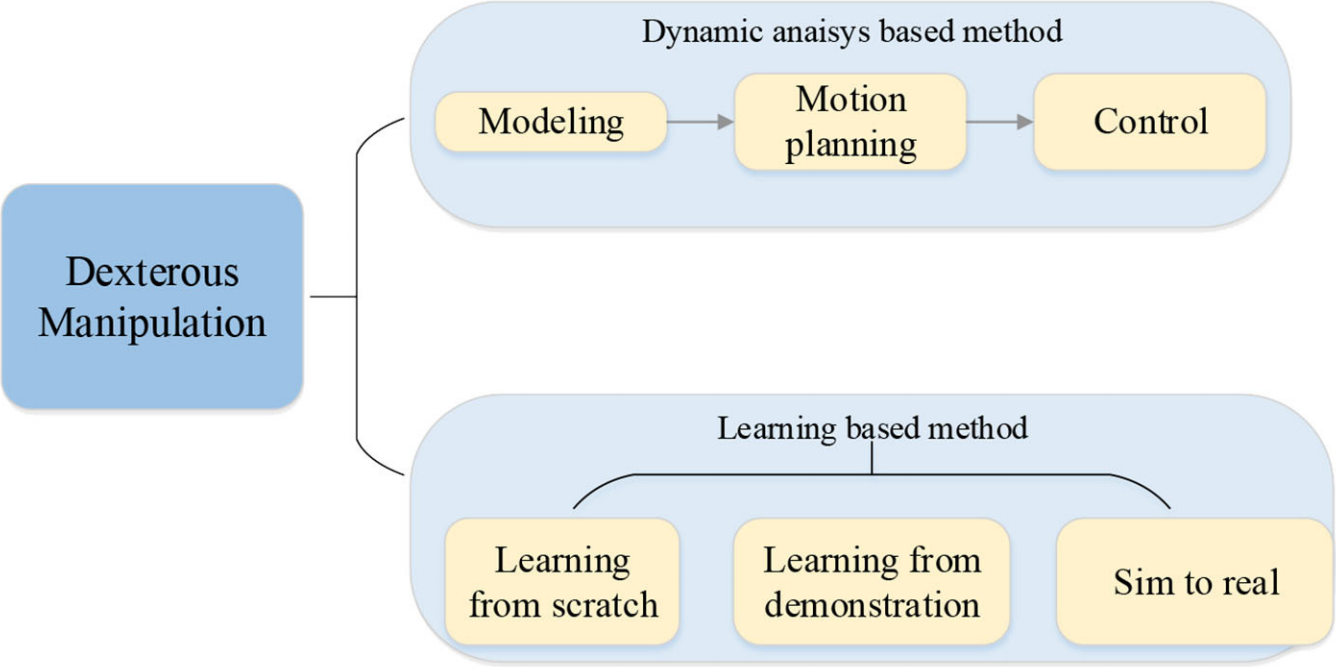
Chunmiao Yu and Peng Wang*, Dexterous Manipulation for Multi-Fingered Robotic Hands With Reinforcement Learning: A Review, Frontiers in Neurorobotics, 2022.
@article{yu2022dexterous, title={Dexterous manipulation for multi-fingered robotic hands with reinforcement learning: a review}, author={Yu, Chunmiao and Wang, Peng}, journal={Frontiers in Neurorobotics}, volume={16}, pages={861825}, year={2022}, publisher={Frontiers} }
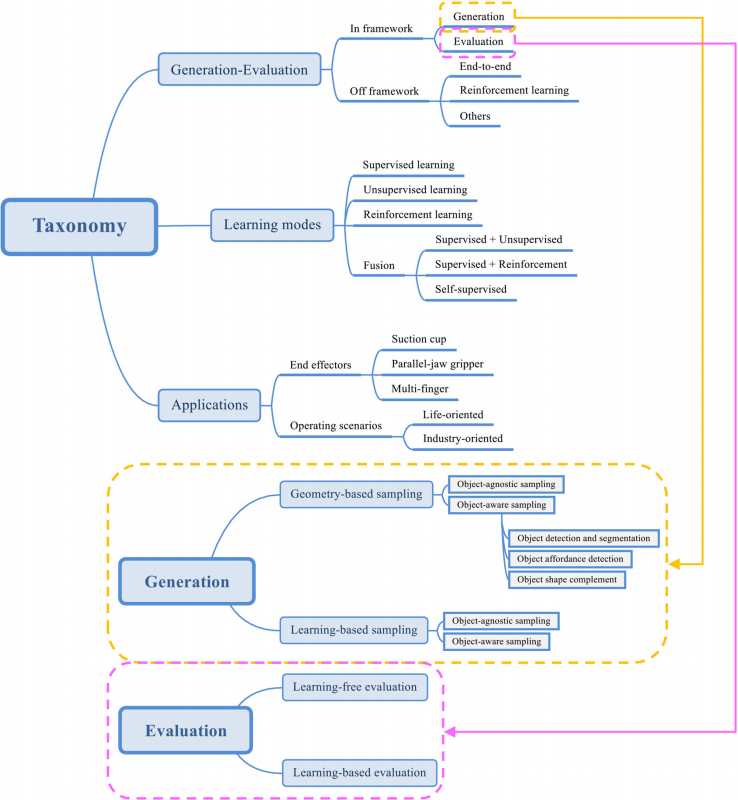
Haonan Duan, Peng Wang*, et. al., Robotics Dexterous Grasping: The Methods Based on Point Cloud and Deep Learning, Frontiers in Neurorobotics, 2021.
@article{duan2021robotics, title={Robotics dexterous grasping: The methods based on point cloud and deep learning}, author={Duan, Haonan and Wang, Peng and Huang, Yayu and Xu, Guangyun and Wei, Wei and Shen, Xiaofei}, journal={Frontiers in Neurorobotics}, volume={15}, pages={658280}, year={2021}, publisher={Frontiers Media SA} }
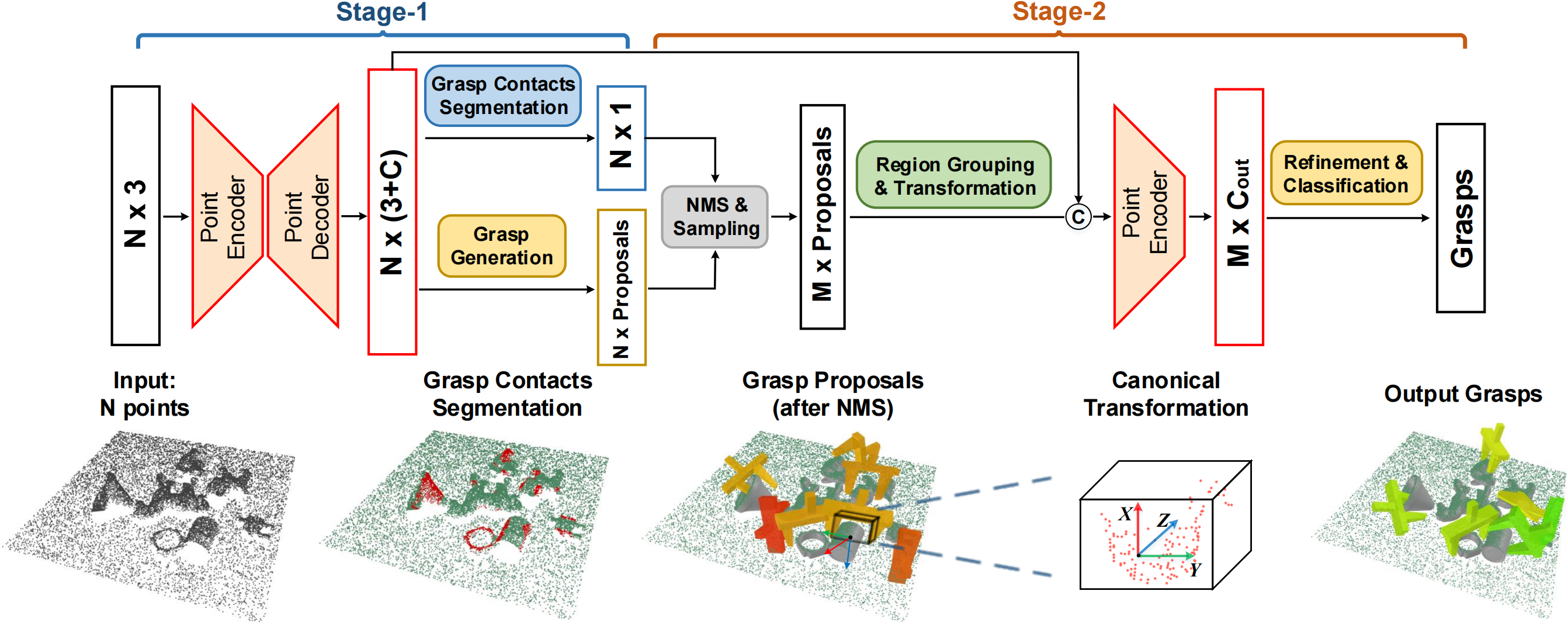
Wei Wei, Peng Wang*, et. al., GPR: Grasp Pose Refinement Network for Cluttered Scenes, IEEE International Conference on Robotics and Automation (ICRA), 2021.
@inproceedings{wei2021gpr, title={Gpr: Grasp pose refinement network for cluttered scenes}, author={Wei, Wei and Luo, Yongkang and Li, Fuyu and Xu, Guangyun and Zhong, Jun and Li, Wanyi and Wang, Peng}, booktitle={2021 IEEE International Conference on Robotics and Automation (ICRA)}, pages={4295--4302}, year={2021}, organization={IEEE} }
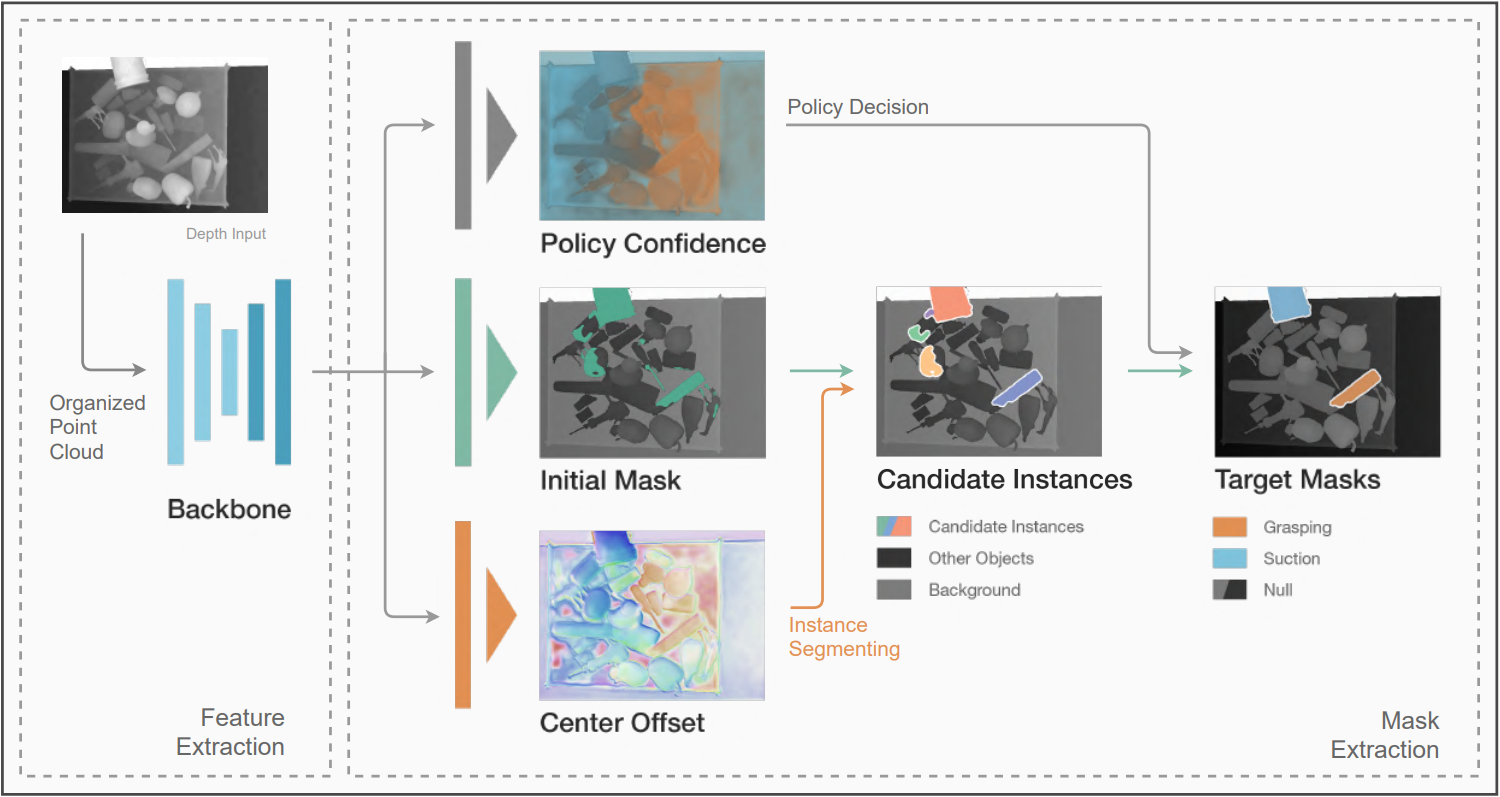
Guangyun Xu, Peng Wang*, et. al., POIS: Policy-Oriented Instance Segmentation for Ambidextrous Robot Picking, IEEE International Conference on Robotics and Automation (ICRA), 2021.
@inproceedings{xu2021pois, title={POIS: Policy-Oriented Instance Segmentation for Ambidextrous Robot Picking}, author={Xu, Guangyun and Tao, Yi and Jiang, Bowen and Wang, Peng and Luo, Yongkang and Zhong, Jun}, booktitle={2021 IEEE International Conference on Robotics and Automation (ICRA)}, pages={743--749}, year={2021}, organization={IEEE} }
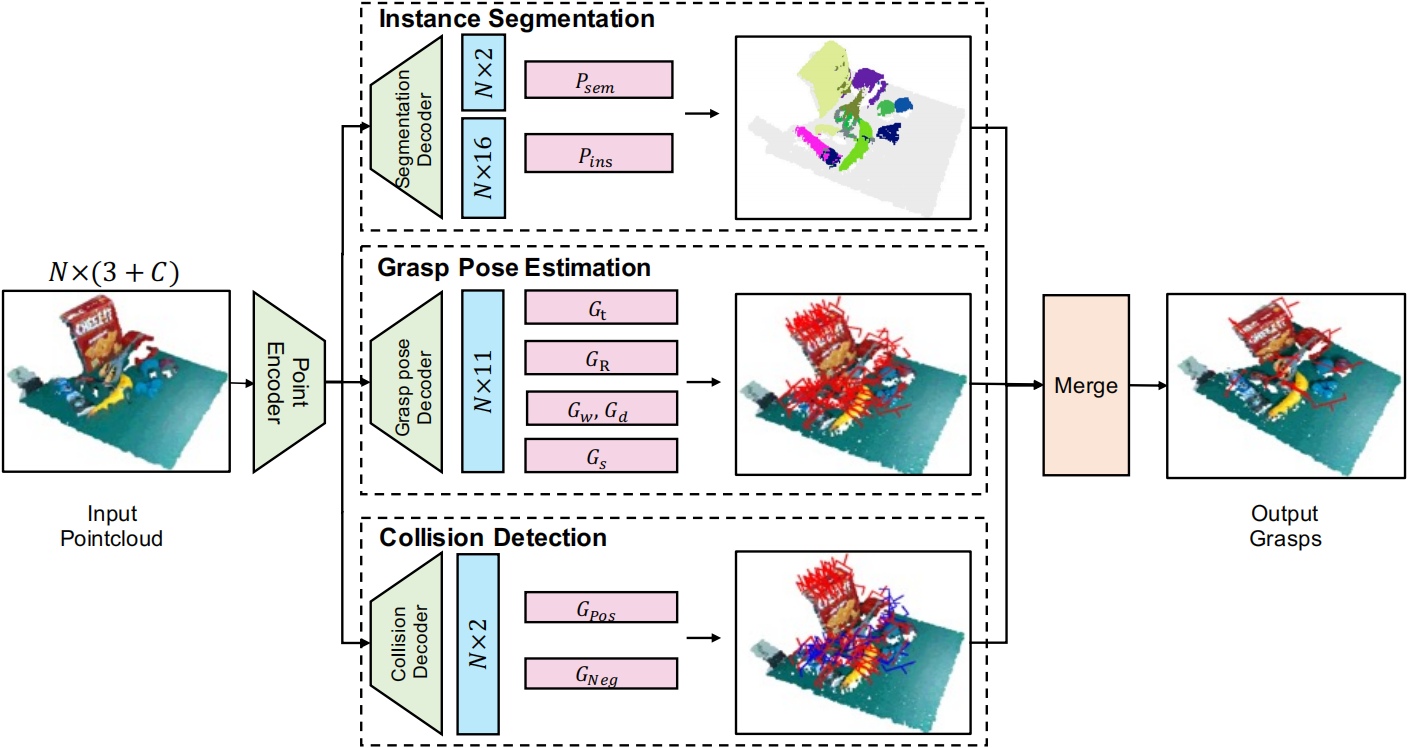
Yiming Li et. al., Simultaneous Semantic and Collision Learning for 6-DoF Grasp Pose Estimation, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021.
@inproceedings{li2021simultaneous, title={Simultaneous semantic and collision learning for 6-dof grasp pose estimation}, author={Li, Yiming and Kong, Tao and Chu, Ruihang and Li, Yifeng and Wang, Peng and Li, Lei}, booktitle={2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, pages={3571--3578}, year={2021}, organization={IEEE} }
![[demo]](images/paper/Research Article/2023 Human-like Dexterous Manipulation for the Anthropomorphic Hand-arm Robotic System via Teleoperation/GIF/2554_1688127267.gif){kind=link}
![[demo]](images/paper/Research Article/2022 Learning Human-to-Robot Dexterous Handovers for Anthropomorphic Hand/GIF/diff_position.gif){kind=link}
![[demo]](images/paper/Research Article/2022 DVGG Deep variational grasp generation for dextrous manipulation/GIF/DVGG-1min.gif){kind=link}
![[demo]](images/paper/Research Article/2022 HGC-Net Deep Anthropomorphic Hand Grasping in Clutter/GIF/Anthropomorphic hand grasping in clutter.gif){kind=link}
![[demo]](images/paper/Research Article/2021 Gpr Grasp pose refinement network for cluttered scenes/GIF/GPR-1min.gif){kind=link}
![[demo]](images/paper/Research Article/2021 Simultaneous Semantic and Collision Learning for 6-DoF Grasp Pose Estimation/GIF/Simultaneous Semantic and Collision Learning for 6 DoF Grasp Pose Estimation.gif){kind=link}